| Last Modified: 01-30-2024 | 6.11:8.1.0 | Doc ID: RM100000001EABU |
| Model Year Start: 2019 | Model: RAV4 | Prod Date Range: [11/2018 - 02/2019] |
| Title: BRAKE CONTROL / DYNAMIC CONTROL SYSTEMS: ELECTRONICALLY CONTROLLED BRAKE SYSTEM (w/o Vacuum Brake Booster): C1231; Steering Angle Sensor Circuit; 2019 MY RAV4 RAV4 HV [11/2018 - 02/2019] | ||
|
DTC |
C1231 |
Steering Angle Sensor Circuit |
DESCRIPTION
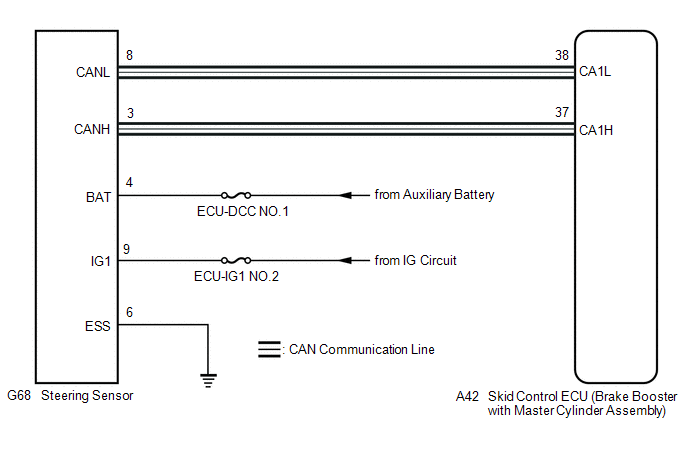
The skid control ECU (brake booster with master cylinder assembly) receives steering sensor signals via CAN communication. When a malfunction occurs in the communication line with the steering sensor, DTC U0126 (Lost Communication with Steering Angle Sensor Module) is stored.
|
DTC No. |
Detection Item |
INF Code |
DTC Detection Condition |
Trouble Area |
Note |
|---|---|---|---|---|---|
|
C1231 |
Steering Angle Sensor Circuit |
701 702 703 |
|
Steering sensor internal malfunction |
- |
WIRING DIAGRAM
CAUTION / NOTICE / HINT
NOTICE:
Inspect the fuses for circuits related to this system before performing the following procedure.
HINT:
-
When U0126 is output together with C1231, inspect and repair the trouble areas indicated by U0126 first.
Click here
![2019 MY RAV4 RAV4 HV [11/2018 - 02/2019]; BRAKE CONTROL / DYNAMIC CONTROL SYSTEMS: ELECTRONICALLY CONTROLLED BRAKE SYSTEM (w/o Vacuum Brake Booster): U0073,...,U0293; Control Module Communication Bus OFF](/t3Portal/stylegraphics/info.gif)
- When a speed sensor or yaw rate and acceleration sensor (airbag ECU assembly) is malfunctioning, DTCs for the steering sensor may be output even when the steering sensor is normal. When DTCs for a speed sensor or the yaw rate and acceleration sensor (airbag ECU assembly) are output together with DTCs for the steering sensor, inspect and repair the speed sensor and yaw rate and acceleration sensor (airbag ECU assembly) first, and then inspect and repair the steering sensor.
PROCEDURE
|
1. |
CHECK DTC |
(a) Clear the DTCs.
Click here
Chassis > ABS/VSC/TRAC > Clear DTCs
(b) Turn the power switch off.
(c) Turn the power switch on (IG) again and check that no CAN communication system DTCs are output.
Click here
(d) Drive the vehicle at a speed of 35 km/h (22 mph), turn the steering wheel to the right and left, and check that no speed sensor and/or yaw rate and acceleration sensor DTCs are output.
Click here
Chassis > ABS/VSC/TRAC > Trouble Codes
|
Result |
Proceed to |
|---|---|
|
DTC C1231 is output. |
A |
|
CAN communication system DTCs are output. |
B |
|
Speed sensor and/or yaw rate and acceleration sensor DTCs are output. |
C |
|
DTC C1231 is not output. |
D |
HINT:
- When CAN communication system DTCs are output, repair the CAN communication system before repairing each corresponding sensor.
- If there is a malfunction in a speed sensor or the yaw rate and acceleration sensor (airbag ECU assembly), an abnormal value may be output even though the steering sensor is normal.
- If speed sensor and yaw rate and acceleration sensor DTCs are output simultaneously, repair the sensors and inspect the steering sensor.
| B |

|
| C |
|
| D |
|
|

|
2. |
CHECK HARNESS AND CONNECTOR (POWER SOURCE TERMINAL) |
|
(a) Turn the power switch off. |
|
(b) Remove the steering wheel and column cover.
(c) Make sure that there is no looseness at the locking part and the connecting part of the connector.
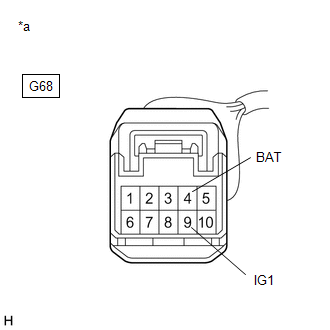
(d) Disconnect the G68 steering sensor connector.
(e) Measure the voltage according to the value(s) in the table below.
Standard Voltage:
|
Tester Connection |
Condition |
Specified Condition |
|---|---|---|
|
G68-4 (BAT) - Body ground |
Always |
11 to 14 V |
|
G68-9 (IG1) - Body ground |
Power switch on (IG) |
11 to 14 V |
| NG |
|
REPAIR OR REPLACE HARNESS OR CONNECTOR (POWER SOURCE CIRCUIT) |
|
|
3. |
CHECK HARNESS AND CONNECTOR (GROUND TERMINAL) |
|
(a) Turn the power switch off. |
|
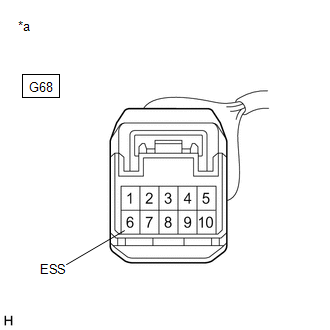
(b) Measure the resistance according to the value(s) in the table below.
NOTICE:
Before measuring the resistance of the steering sensor, turn the power switch off and leave the vehicle for 1 minute or more without operating the key, switches or opening or closing the doors.
Standard Resistance:
|
Tester Connection |
Condition |
Specified Condition |
|---|---|---|
|
G68-6 (ESS) - Body ground |
1 minute after power switch off |
Below 1 Ω |
HINT:
If troubleshooting has been carried out according to Problem Symptoms Table, refer back to the table and proceed to the next step.
Click here
| OK |
|
| NG |
|
REPAIR OR REPLACE HARNESS OR CONNECTOR (GROUND CIRCUIT) |
|
|
|